micro:witch を更新してマイナーバージョンを1つ上げた。(説明ページ)
https://github.com/EiichiroIto/microwitch/releases/tag/v1.3.0
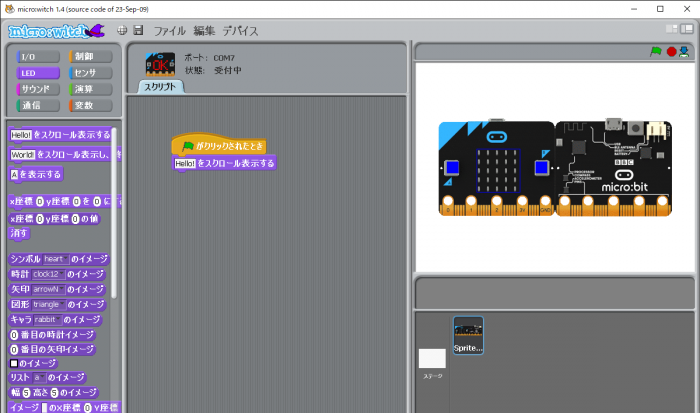
Assetsの microwitch-v1.3.0-win.zip をダウンロードしてZIPファイルを展開したフォルダ内にある Scratch.exe を実行すると以下のような画面が現れる。
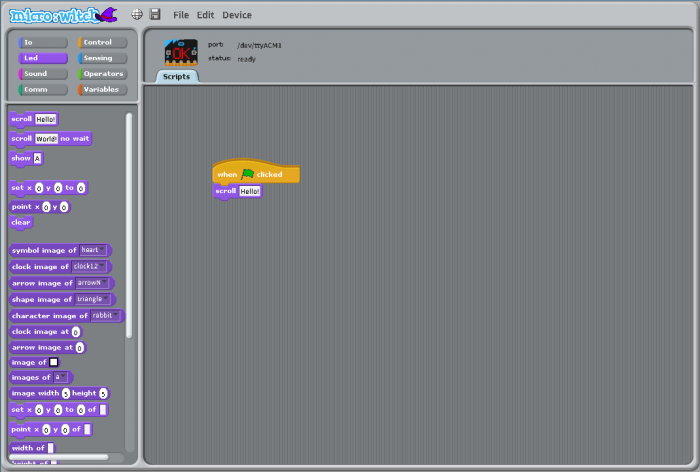
以前のバージョンでは右側にmicro:bitのシミュレータがあったが、今回のバージョンからは取り除いて広いスクリプトエリアを確保するように変更した。
micro:bit に接続している状態でブロックをクリックするとスクリプトを転送してから実行されるが、接続していない状態ではブロックをクリックしても何も起こらない。
その他、以下のような細々とした修正を行った。
- ファームウェアの送信時と完了時にメッセージを表示するようにした。
- 日本語ロケールを更新した。
- いくつかのクラスでリファクタリングを行った。