長らくファイルサーバーとして使っていたLivaの調子が悪くなり、ubuntu server 24.04 を再インストールしようとしてもエラーでインストールできなくなってしまった。
内蔵のemmcが寿命かもしれないと思い、スティック型SSDを付けてインストールを試みてもやはりインストールが最終段階で失敗してしまう。とりあえず起動はできるものの、ユーザー設定などがされていないためログインすらできない。
以下はそんなときの備忘録。
続きを読む →長らくファイルサーバーとして使っていたLivaの調子が悪くなり、ubuntu server 24.04 を再インストールしようとしてもエラーでインストールできなくなってしまった。
内蔵のemmcが寿命かもしれないと思い、スティック型SSDを付けてインストールを試みてもやはりインストールが最終段階で失敗してしまう。とりあえず起動はできるものの、ユーザー設定などがされていないためログインすらできない。
以下はそんなときの備忘録。
続きを読む →Windows 11 のアップデートで Ubuntu とのデュアルブートができなくなったときの対処方法。
grub> set root=(hd1,gpt5)
grub> linux /boot/vmlinuz-x.y.z-w-generic root=/dev/nvme0n1p5
grub> initrd /boot/initrd.img-x.y.z-w-generic
grub> boot(hd1,gpt5)は ls で ext4 を探してみつかったもの。
x,y,zは Tab を押して適当に選ぶ。
もとの Ubuntu が起動したらログインしてコンソールを開き、以下を入力。
> sudo grub-install --efi-directory=/boot/efi
> sudo update-grubおわり。
いろいろ変わってる
OSPlatform current runCommand: 'echo abc > abc'.記事にするほどのものじゃないんだけど、clone 時に –recursive でsubmoduleも取り込んでおけということ。
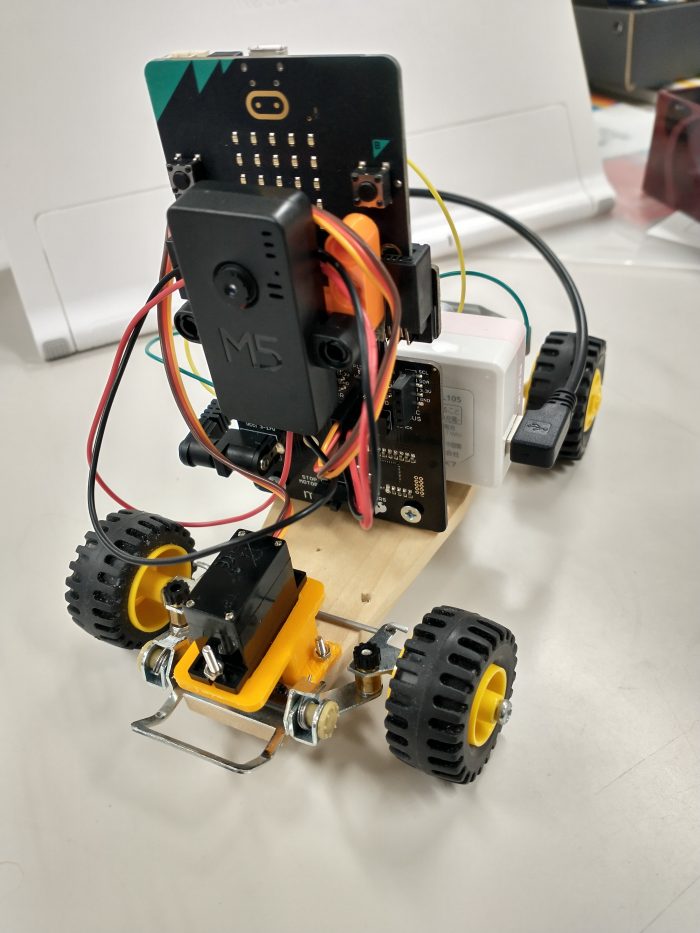
以前からタミヤの「バギー工作基本セット」のステアリングをサーボで制御したいと思っていた。というより、いろいろ試していたのだが、なかなかうまい方法が見つからなかった。
最近作っていたのがこれ。
見てのとおり不安定極まりない。
バギー工作基本セットにステアリング用のサーボをつける試みは多数あって、上図のようにサーボを下向きにつけるものや、上向き、横向きなど諸兄がいろいろ試されている。
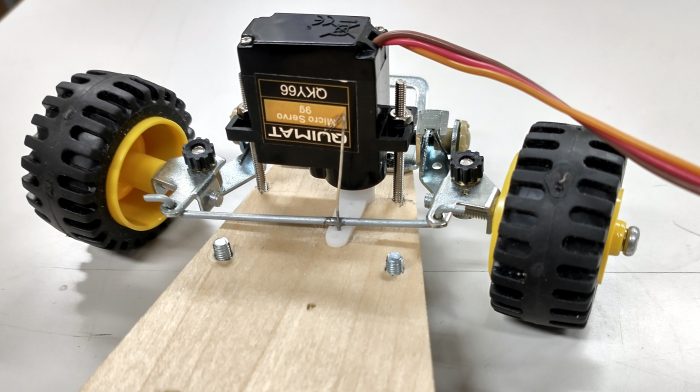
自分としてはロボット講座とかで気軽に使いたいので、サーボのステイを3Dプリンタで作ることにしてみた。20分くらいで印刷できる、こんなやつ↓↓↓
続きを読む →前回の記事では、Debug Probe のハードウェアの準備について説明した。今回はソフトウェア側を準備して、実際にプログラムをデバッグ実行してみる。
続きを読む →スイッチサイエンスに Raspberry Pi pico 用の Debug Probe がある。
これは Raspberry Pi pico に取り付けてデバッグできるようにするものらしい。別にこれを購入しなくても、もう1台 Pico があれば同じことができるみたいだけど、コンパクトでケースにも入っているので買ってみた。
せっかくなので、これを使ってデバッグする流れを確かめてみよう。こちらにある情報を参考にしてみた。
https://www.raspberrypi.com/documentation/microcontrollers/debug-probe.html
まずはハードウェアから準備していく。
続きを読む →